Direct Edge Alignment (D-EA)
Abstract
There has been a paradigm shifting trend towards feature-less methods due to their elegant formulation, accuracy and ever increasing computational power. In this work, we present a direct edge alignment approach for 6-DOF tracking. We argue that photo-consistency based methods are plagued by a much smaller convergence basin and are extremely sensitive to noise, changing illumination and fast motion. We propose to use the Distance Transform in the energy formulation which can significantly extend the influence of the edges for tracking. We address the problem of non-differentiability of our cost function and of the previous methods by use of a sub-gradient method. Through extensive experiments we show that the proposed method gives comparable performance to the previous method under nominal conditions and is able to run at 30 Hz in single threaded mode. In addition, under large motion we demonstrate our method outperforms previous methods using the same run-time configuration for our method.Illustration
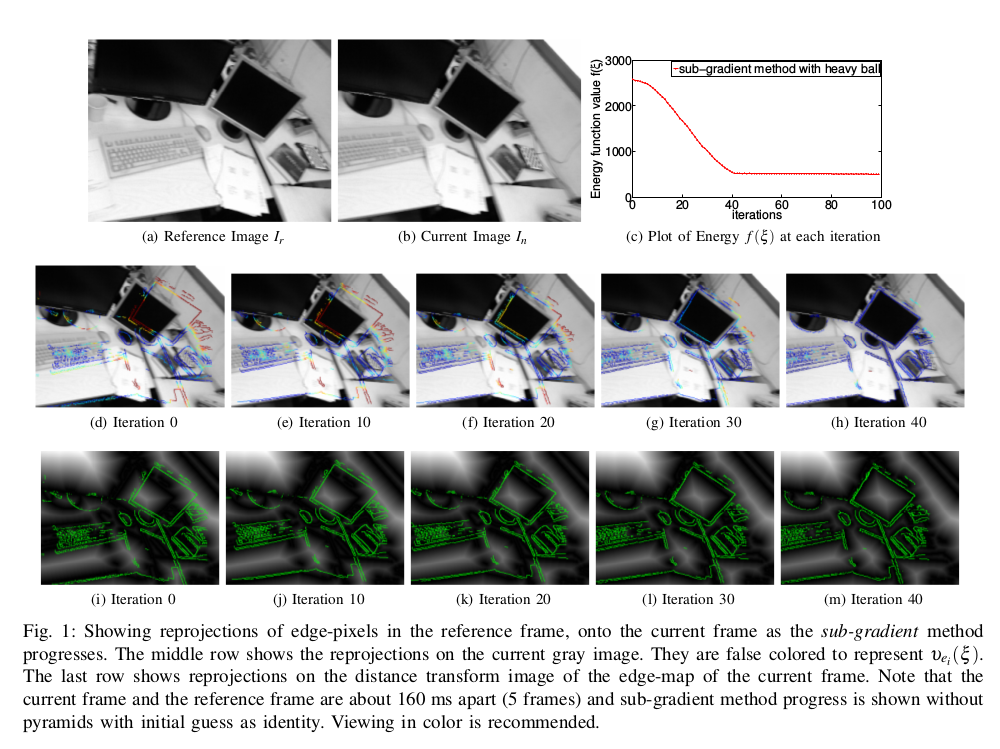
 Showing residues at every iteration as the optimization proceeds to estimate the relative pose (rotation and translation) between a pair of images spaced about 90ms apart. Red represents higher residues, blue represent smaller residues.
Showing residues at every iteration as the optimization proceeds to estimate the relative pose (rotation and translation) between a pair of images spaced about 90ms apart. Red represents higher residues, blue represent smaller residues. Reprojected 3D edge pixels from reference image, overlayed on distance transform of the edge image of the current frame.
Reprojected 3D edge pixels from reference image, overlayed on distance transform of the edge image of the current frame.
Publication
Kuse M., Shen S. “Robust Camera Motion Estimation using Direct Edge Alignment and Sub-gradient Method“. In Proc. of IEEE International Conference on Robotics and Automation (ICRA), 2016 in Stockholm, Sweden. [PDF]Yonggen Ling, Manohar Kuse, and Shaojie Shen, “Direct Edge Alignment-Based Visual-Inertial Fusion for Tracking of Aggressive Motions“, submitted in Springer Autonomous Robots (Impact factor 2.706 in 2016). [PDF][More][Code-github][Springer-link][
]Source Code & Documents
Git Repo : https://github.com/mpkuse/rgbd_odometry Documentation : [ZIP] (generated with Doxygen) Pre-requisites: ROS (hydro and above), Eigen, IGL Library, OpenCV.Standalone implementation: https://github.com/mpkuse/edge_alignment
Code-github from Ling Yongyen
Full Presentation : [PDF] ICRA Spot-light talk : [Google Slides] [Copy of] Interactive Poster : [Prezi]
Other Data for Download
Reprojections for a image-pair (full results similar to figure-1 of the paper) : [ZIP] Relatives Poses for sequences and related scripts : [ZIP]Summary of Algorithm
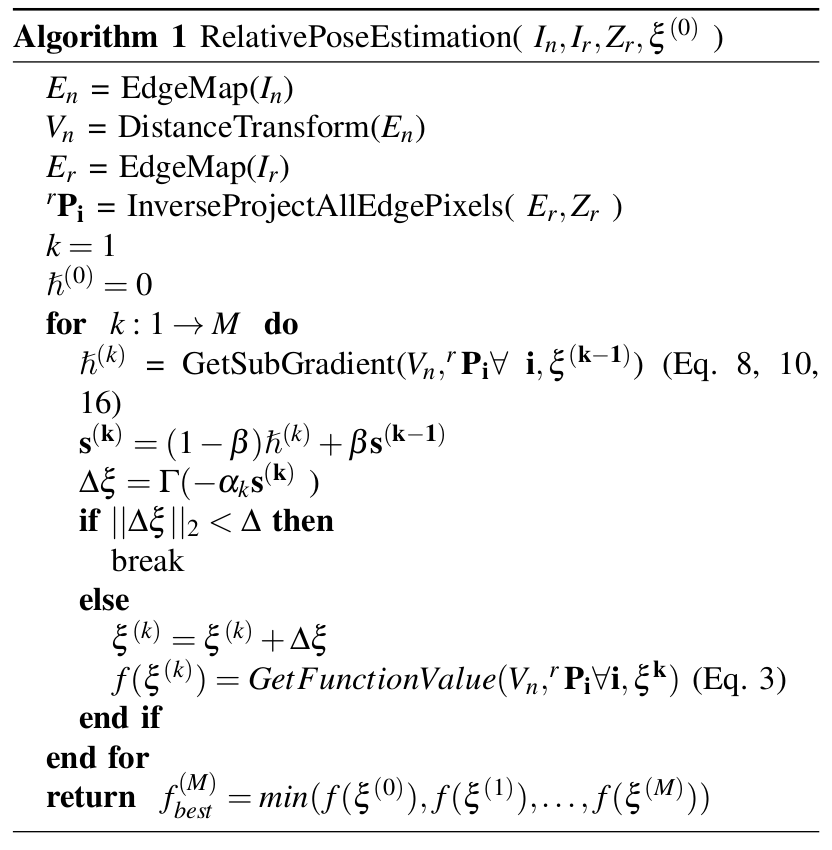
(For details please refer to the publication)